고정 헤더 영역

상세 컨텐츠
본문
반응형
Isaac ROS 환경 개발을 위한 정리 진행
Isaac ROS 개발 환경은 스크립트 run_dev.sh를 사용하여 대상 플랫폼의 Docker 컨테이너 내에서 실행
플랫폼 : x86_64, Jetson
Isaac Sim Download
- workstation 기준 설치
- Omniverse 다운
- Launcher에서 Isaac Sim, Cache, Nucleus 설치하기
- Omniverse 다운
Developer Environment Setup
Isaac Sim Setup
- Omniverse 기반 Isaac Sim 설정 및 시작
- ./isaac-sim.sh 로 시작 (~/.local/share/ov/pkg/isaac-sim-4.2.0 - 다운로드 경로)
Nvblox
- isaac_ros_nvblox 설치
- ros2 launch nvblox_examples_bringup isaac_sim_example.launch.py 실행
- ros2 launch nvblox_examples_bringup isaac_sim_example.launch.py 실행
Isaac Sim 환경 Examples
- 업무
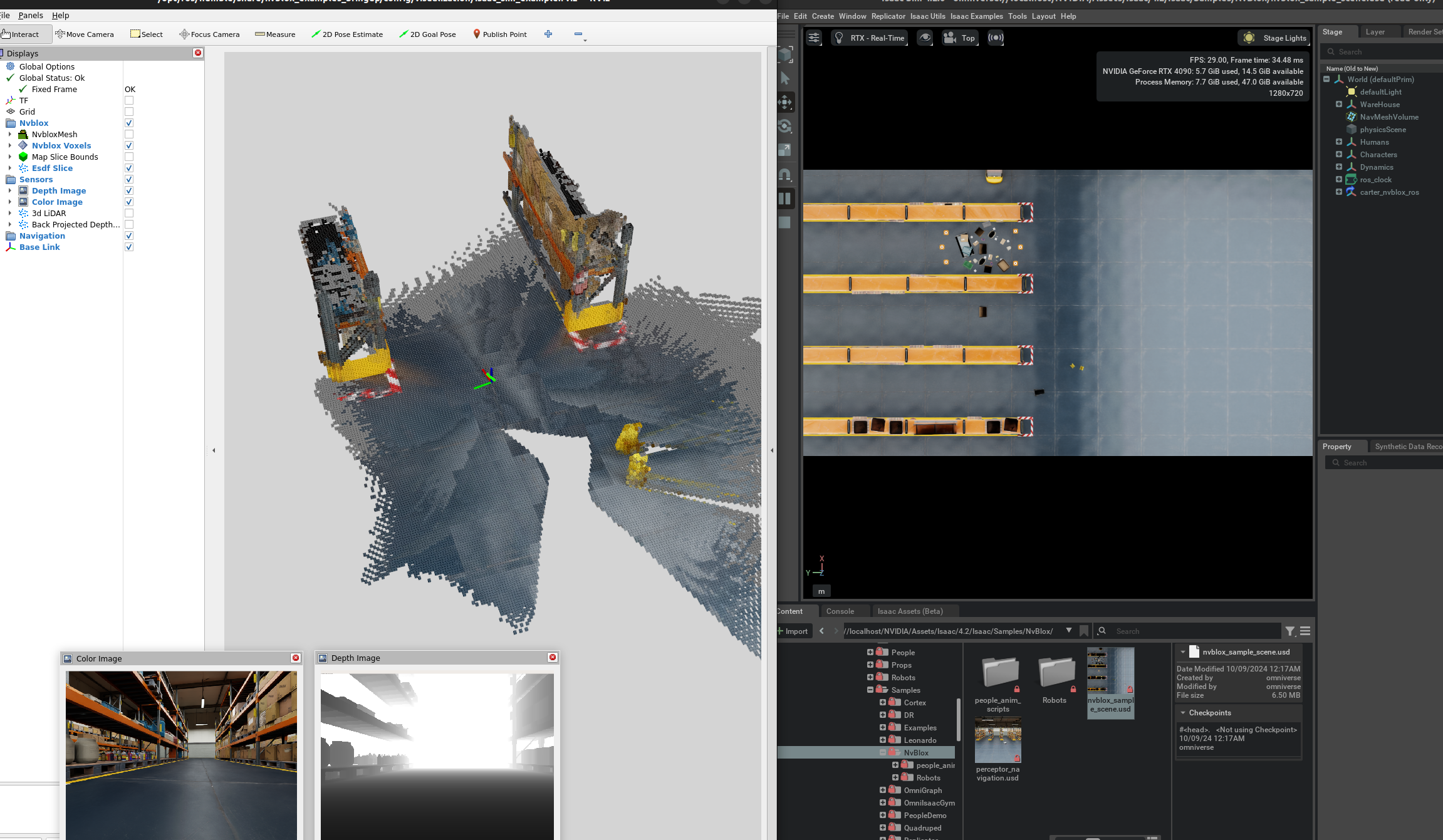
- assets 가져오기 -> localhost/NVIDIA/Assets/Isaac/4.2/Isaac/Samples/NvBlox/nvblox_sample_scene.usd
-> Play 버튼 실행하여 시뮬레이션 실행- http://localhost:34080/omniverse://localhost/NVIDIA/Assets/Isaac/4.2/Isaac/IsaacLab/
https://nvidia-isaac-ros.github.io/concepts/scene_reconstruction/nvblox/tutorials/tutorial_isaac_sim.html
- http://localhost:34080/omniverse://localhost/NVIDIA/Assets/Isaac/4.2/Isaac/IsaacLab/
- assets 가져오기 -> localhost/NVIDIA/Assets/Isaac/4.2/Isaac/Samples/NvBlox/nvblox_sample_scene.usd
Isaac Sim Examples — isaac_ros_docs documentation
Note Because the animation requires execution of Python scripts, running the scene with the UI asks you to confirm that you want to enable script execution. Click Yes to make it possible to start the scene and the people animation.
nvidia-isaac-ros.github.io
- Isaac Sim에서 스트리밍되는 시뮬레이션된 데이터에서 Isaac ROS Nvblox을 실행하여, 시뮬레이션에서 depth 이미지 데이터를 재구성하여 Nav2와 Costmap으로 변환
- pose와 depth를 추정하기 위해, Isaac ROS Visual SLAM과 Isaac ROS DNN Stereo Depth를 사용
반응형
'Robotics' 카테고리의 다른 글
| Elevation Mapping 구현을 위한 코드 분석 (3) | 2025.01.17 |
|---|---|
| Elevation Mapping 구현을 위한 논문 분석 - 1 (1) | 2025.01.17 |
| ROS2 - Isaac SIM 충돌 (2) | 2025.01.10 |
| Local Path Planner Survey (0) | 2025.01.09 |
| Locomotion (0) | 2025.01.09 |




